














Connecting BTS7960 to ESP32
December 9, 2025, 7:12 pm by: cuagfe
Unknown
GPS location
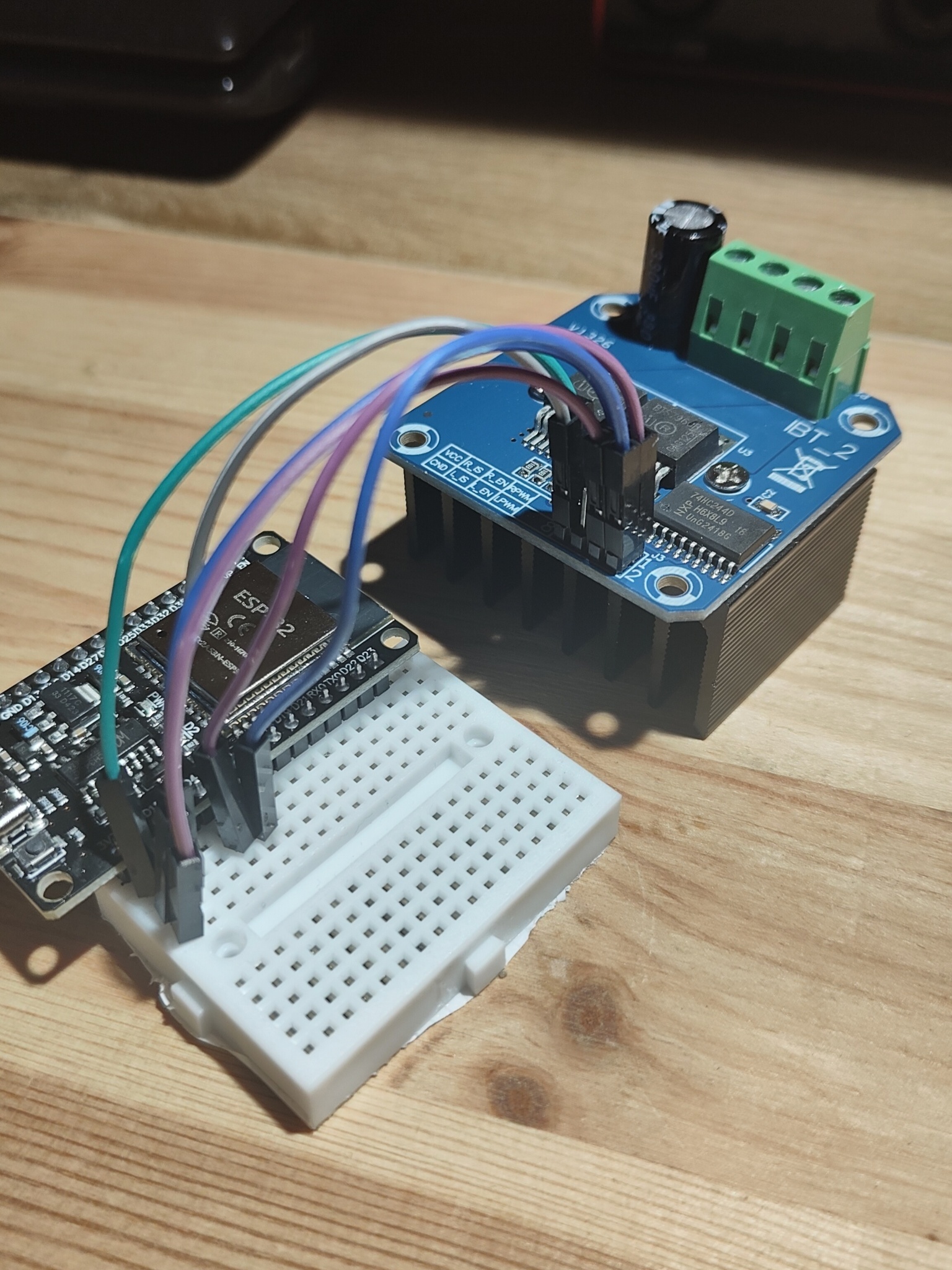
3.3V volts output from ESP32 goes to VCC, R_EN, L_EN
ESP32 GND goes to GND
ESP32 D4 goes to RPWM
ESP32 D16 goes to LRPM
Arduino IDE code:
// ESP32 + BTS7960 – smooth acceleration and braking 20→100→20%
// Direction: first LEFT, then RIGHT, in a loop
#define RPWM_PIN 4 // right
#define LPWM_PIN 16 // left
#define LED_PIN 2 // LED – lights up when the motor is running
const int pwmFreq = 20000;
const int pwmResolution = 8; // 0–255
const int stepTime = 2000; // 2 seconds for each 10% step
void setup() {
Serial.begin(115200);
ledcAttach(RPWM_PIN, pwmFreq, pwmResolution);
ledcAttach(LPWM_PIN, pwmFreq, pwmResolution);
pinMode(LED_PIN, OUTPUT);
digitalWrite(LED_PIN, LOW);
Serial.println("Start: smooth LEFT → RIGHT → LEFT...");
delay(1000);
}
void loop() {
// ==================== LEFT: 20% → 100% → 20% ====================
runDirectionSmooth(LPWM_PIN, RPWM_PIN, "LEFT");
// Short pause after the full left cycle
stopMotor();
delay(1000);
// ==================== RIGHT: 20% → 100% → 20% ====================
runDirectionSmooth(RPWM_PIN, LPWM_PIN, "RIGHT");
// Short pause after the full right cycle
stopMotor();
delay(1000);
}
// =====================================================
// Function: smooth acceleration and braking in one direction
// =====================================================
void runDirectionSmooth(int forwardPin, int reversePin, String dirName) {
// Acceleration: 20% → 100%
for (int duty = 51; duty <= 255; duty += 25) { // 51≈20%, 255=100%, step ≈10%
int percent = (duty * 100) / 255;
Serial.printf("→ %s: %d%% (duty=%d)n", dirName.c_str(), percent, duty);
digitalWrite(LED_PIN, HIGH);
ledcWrite(forwardPin, duty);
Leave comment
~Jesenia Cowles said at May 27, 2026, 8:55 pm :
Resurrect your old customer list
That list of past quotes gathering dust is a gold mine. We use those old lead lists and show your TV ads directly to that exact list on the big screen.
Our technology skips low-income areas, ensuring your money only targets homeowners who can actually pay.
It’s one flat rate with no hidden middleman costs. 100% of your spend buys your inventory to your target customers.
Check local availability here:
topshelfpromotion.com
~Louisa Boggs said at May 24, 2026, 5:53 pm :
Quick note,
Thought you might want this.
There’s a completely free tool that lets you submit your website across multiple classified sites with a single submission.
This is it:
classifiedsubmitter.com
It’s totally free and takes under a minute.
If you want more free tools, let me know.
~Brock Simas said at May 24, 2026, 10:30 am :
Quick note,
Thought you might want this.
There’s a completely free tool that lets you get listed fast across multiple classified sites with one form.
Check this out:
classifiedsubmitter.com
It’s totally free and takes less time than posting manually.
Reply if you want more ways to promote your site.
~Annis Wilbanks said at May 24, 2026, 4:35 am :
Hello,
Found your site and wanted to share this.
There’s a 100% free tool that lets you boost your visibility across multiple classified sites with just a few clicks.
Go here:
classifiedsubmitter.com
It’s free to use and takes under a minute.
Reply if you want more ways to promote your site.
~Trent Silcock said at May 23, 2026, 9:42 am :
Hey,
Saw your site and figured this might be valuable.
I wanted to share a free resource that helps you submit your website across multiple classified sites with almost no effort.
If you want to get listed quickly, here’s the site:
www.classifiedsubmitter.com
It’s free to use and takes seconds.
If you want more free traffic tools, let me know.
~Kenton Aiston said at May 23, 2026, 3:30 am :
Good day,
I work with a lot of small businesses and thought you'd appreciate this.
Here’s a free service that can help you promote your site across multiple classified sites with one simple form.
If you want to get listed quickly, here’s the site:
www.classifiedsubmitter.com
It’s completely free and takes less effort than posting manually.
Just reply if you want more ideas.
~Patricia Bordelon said at April 28, 2026, 5:00 am :
When was the last time you checked your current business borrowing power?
Smart business owners update and benchmark their business borrowing power on a quarterly basis.
It's the recommended frequency that keeps them prepared for unexpected cash flow challenges, emergencies, and exciting business opportunities.
Our simple 2-minute borrowing power check is used by thousands of businesses monthly to confirm their:
→ Maximum funding potential → Market rate → Loan term options → Payment
So you never have to guess when the need is present.
If you don't know your number, that's a risk your business is carrying right now.
At least find out. It takes 2 minutes and costs nothing.
Get My Number www.helloratesfastfunding.com
No credit impact. No obligation. No spam.
Just confidence in how your business can work for you.
Ryan
Senior Business Funding Advisor, HelloRates
HelloRates Business Funding Solutions helps thousands of businesses explore commercial financing options. This is not a credit application. Checking your borrowing power has no impact on your credit score. Offer only available to US based businesses.
~Kristy Brackett said at April 28, 2026, 12:33 am :
The Risk Angle
Not knowing your business borrowing power is a risk most owners don't realize they're carrying.
Smart business owners update and benchmark their business borrowing power on a quarterly basis.
It's the recommended frequency because cash flow challenges, equipment failures, and exciting opportunities rarely announce themselves in advance.
Our simple 2-minute borrowing power check is used by thousands of businesses monthly to confirm their:
→ Maximum funding potential → Market rate → Loan term options → Payment
So you never have to guess when the need is present.
At least find out where you stand. It takes 2 minutes and costs nothing.
Get My Number www.helloratesfastfunding.com
No credit impact. No obligation. No spam.
Just confidence in how your business can work for you.
Ryan
Senior Business Funding Advisor, HelloRates
HelloRates Business Funding Solutions helps thousands of businesses explore commercial financing options. This is not a credit application. Checking your borrowing power has no impact on your credit score. Offer only available to US based businesses.
~Faustino Nord said at April 27, 2026, 12:47 pm :
When was the last time you checked your current business borrowing power?
Smart business owners update and benchmark their business borrowing power on a quarterly basis.
It's the recommended frequency that keeps them prepared for unexpected cash flow challenges, emergencies, and exciting business opportunities.
Our simple 2-minute borrowing power check is used by thousands of businesses monthly to confirm their:
→ Maximum funding potential → Market rate → Loan term options → Payment
So you never have to guess when the need is present.
If you don't know your number, that's a risk your business is carrying right now.
At least find out. It takes 2 minutes and costs nothing.
Get My Number www.helloratesfastfunding.com
No credit impact. No obligation. No spam.
Just confidence in how your business can work for you.
Ryan
Senior Business Funding Advisor, HelloRates
HelloRates Business Funding Solutions helps thousands of businesses explore commercial financing options. This is not a credit application. Checking your borrowing power has no impact on your credit score. Offer only available to US based businesses.
~Leesa Eastin said at April 10, 2026, 4:33 pm :
We put your business on Hulu, Roku, and Live Sports for one flat rate. Once we find a qualified homeowner from your list, your brand follows them from the big-screen TV to the smartphone in their pocket. topshelfpromotion.com
~Odell Remer said at April 6, 2026, 10:54 pm :
The most prepared business owners all have one thing in common. They already know their number.
Benchmarking your business borrowing power every quarter is the recommended frequency that keeps you confident and ready for unexpected cash flow challenges, emergencies, and exciting business opportunities.
Our simple 2-minute borrowing power check is used by thousands of businesses monthly to confirm their:
→ Maximum funding potential → Market rate → Loan term options → Payment
So you never have to guess when the need is present.
If you don't know your number yet, it takes 2 minutes and costs nothing to find out.
Get My Number www.helloratesfastfunding.com
No credit impact. No obligation. No spam.
Just confidence in how your business can work for you.
Ryan
Senior Business Funding Advisor, HelloRates
~Lilly Clibborn said at April 3, 2026, 9:22 pm :
Is your business feeling these same pains too?
+ Partial financing approvals that derail the job before it starts
+ Full credit declines with no way to recover the customer
+ High merchant fees or per-loan fees that compress your margins on every job
We offer a single, frictionless solution to all three:
any contractor, any project type. No need to switch or change anything you already have.
It works seamlessly alongside your current lender, or as a complete standalone financing solution and is the only program your business would ever need.
10,000+ contractors are already using this to close the gap and complete their financing stack.
See full program info here: helloratesdealersolutions.com
Or use the link in my signature.
James
HelloRates Contractor Financing Solutions
Complete financing coverage for any contractor
Charleston, SC · helloratesdealersolutions.com
If you received this in error or would like to unsubscribe, visit helloratesdealersolutions.com/unsubscribe
~Wolfgang Nevile said at March 30, 2026, 4:11 am :
Ever stop to think how much you're spending on marked-up CPMs for Connected TV ads?
If you're using “premium” audience segments without verifying who you're actually reaching, that money is likely feeding someone else's family.
No pressure. Here’s the site if you're open to see a revolutionary vision for digital advertising
topshelfaudience.com using real-time Intent data from an Integration in our platform to Lotame.com. You can reach me at marketing@mrmarketingres.com or 843-720-7301. And if this isn't a fit please feel free to email me and I'll be sure not to reach out again. Thanks!
~Alana Sansom said at March 25, 2026, 3:54 pm :
Hello,
Came across your site and figured this was worth sending.
There’s a 100% free tool that lets you get more exposure across multiple classified sites with just a few clicks.
This is it:
www.classifiedsubmitter.com
It’s totally free and takes under a minute.
If you want more free tools, let me know.
~Linnie Roderick said at March 24, 2026, 10:42 am :
Want your message to reach real businesses without relying on luck or timing?
Contact form blasting delivers your offer directly through website contact forms — fast, targeted, and impossible to ignore.
No algorithms. No bidding. No waiting for traffic.
Just guaranteed delivery straight to the inboxes companies check daily.
Whether you’re promoting a service, launching something new, booking calls, or generating leads, contact form blasting gives you the reach your business needs.
If this message reached you, imagine what your message can do across thousands — or millions — of websites.
Start your campaign at contactpageads.com and get your offer in front of real prospects.
~Jacquie Binion said at March 20, 2026, 2:43 pm :
Hi,
I’m Carl Solomon from Velociti Consultancy Group, a Finnish-registered company with operations in Canada. We connect businesses with lenders/investors in Qatar, Oman, the UAE, and Saudi Arabia for structured financing—loans at 3% interest, up to 2-year grace, and flexible security.
If you’re exploring funding, please share your requirements for a confidential discussion.
Warm regards,
Carl Solomon
Velociti Consultant Group
carl@velociticonsultant.com
Mobile:+1 437 220 4900
WhatsApp: +1 437 220 4900
~Marian Faust said at February 19, 2026, 5:03 am :
Want your offer to be seen instead of ignored?
Contact form blasting puts your message directly onto real business websites — fast, consistent, and impossible to overlook.
No ads. No bidding. No waiting for someone to stumble across your page.
Just guaranteed delivery straight to the inboxes businesses actually monitor.
Whether you’re promoting a service, selling a product, scheduling calls, or generating leads, contact form blasting gives you the reach your business needs.
If this message reached you, imagine what your message can do across thousands — or millions — of websites.
Start your campaign at contactpageads.com and get your offer seen.